|
特点1 高速・多轴控制
|
|
采用高速CPU,大幅度缩短命令执行时间。
通过使用MECHATROLINK-II(传送速度10Mbps),同时控制数轴(最大256轴)时,都能实现完美的高速运动。
|
|
特点2 高同步性
|
|
因为MP2200可以实现多轴同步控制,能够用于多种用途,大幅提高机械精度。
|
|
特点3 优越的操作性
|
|
使用MPE720编程软件,基于Windows® 操作规则,可以用比较直观的梯形图来编程,通过鼠标的拖放操作,剪切&粘贴,可以实现轻松编程。
产品追求系统必要设定、程序管理及记述方法的效率化,致力于缩短设计时间及保养作业时间。
|
|
特点4 灵活性和实用性
|
|
根据可选模块的组合,可以自由构建模拟量类型,通讯类型,各种伺服电机结合其他公司的上位控制,也可以实现I/O的分散控制。
|
MP2200 规格
一般规格
|
项 目
|
规 格
|
|
物
理
环
境
|
使用环境温度
|
0~+55℃*
|
|
保存环境温度
|
-25~+85℃
|
|
使用环境湿度
|
30~95%RH(不得结露)
|
|
保存环境湿度
|
5~95%RH(不得结露)
|
|
污染度
|
以JIS B3501为准(污染度1)
|
|
耐腐蚀性
|
不得有易燃、腐蚀性气体
|
|
使用高度
|
海拔高度2000m以下
|
|
电
气
运
行
条
件
|
抗干扰
|
以EN6100-6-2,EN55011(Group 1 Class A)为准
电源干扰(FT干扰):2kV以上、1分钟
辐射干扰(FT干扰):1kV以上、1分钟
|
|
机
械
运
行
条
件
|
抗振动
|
以JIS B3502为准
1. 振动频率 16.7Hz
振动强度 14.7m/s2
3方向各2小时
2. 振动频率 10~57Hz
振动幅度 单边振幅0.075mm
3. 振动频率 57~150HZ
振动强度 等加速度9.8m/s2
|
|
抗冲击
|
冲击强度:峰值加速度147m/s2(15G)
作用时间11ms:每轴各2次
|
|
设置条件
|
接地
|
D种接地
|
|
冷却方式
|
自然风冷
|
当装有PO-01时,请在0~+50℃的范围内使用。
● MP2200基本单元
|
项 目
|
规 格
|
|
JEPMC-BU2200(MBU-01)
|
JEPMC-BU2210(MBU-02)
|
|
电源
|
输入电源电压:AC85V~AC276V
消耗电流:1.5A以下,输入输出额定时
突入电流:10A以下,完全放电状态
输入:AC200V,输出额定时
|
输入电源电压:DC24V±20%
消费电流:3.0A以下,输入输出额定时
突入电流:10A以下,完全放电状态,输出额定时
|
|
通信模块
|
没有基本单元
|
|
输入输出信号
|
没有基本单元
|
|
可选插槽
|
9孔
|
|
扩张构成
|
使用EXIOIF,最多可以连接4个基本单元。
|
|
外形尺寸
|
240(W)×130(H)×108(D)mm
|
|
大概重量
|
665g
|
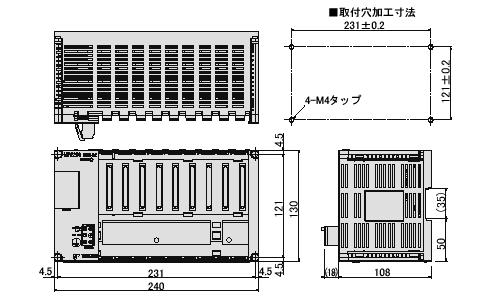
运动控制器 MP2200 外形
● MP2200基本单元(单位:mm)
 ● MECHATROLINK-II输入输出模块(单位:mm)
● MECHATROLINK-II输入输出模块(单位:mm)

文章分页:1

